
Although I’ve made smaller boards for a while now I’ve never done a Pico launch. Pico launch is generally a small, NOTAM exempt (< 2 meters diameter at any point) balloon. I’ve obtained some 36″ Qualatex Foil balloons from http://www.randomengineering.co.uk. These can lift about 60g to about 4km and will, hopefully, float.
Taking the existing board and breaking out the hot wire cutter I set about making a very small but insulated container for the board out of expanded polystyrene :
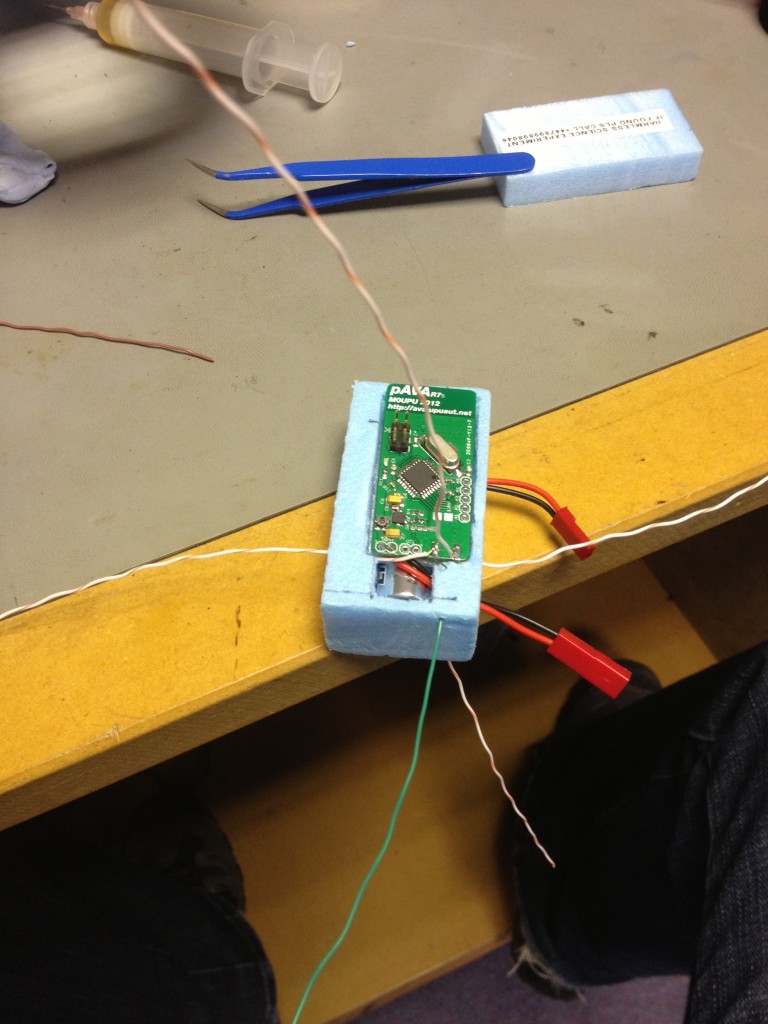
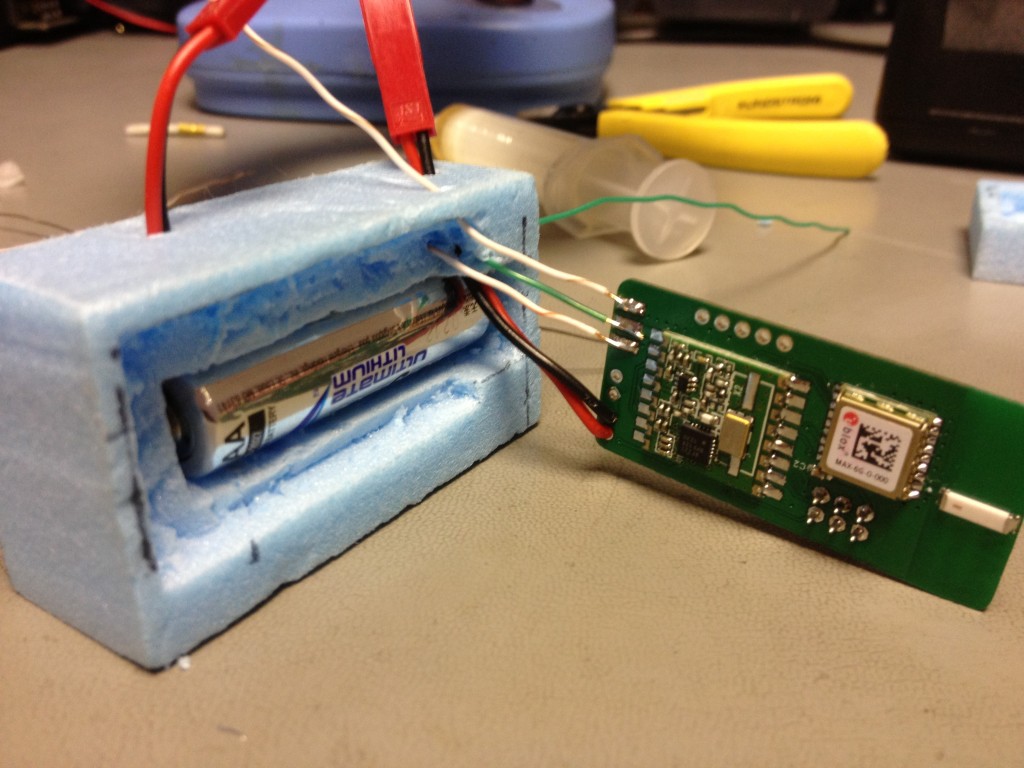 The single AA was mounted centrally, a small piece of thin foam insulated this from the PCB which was placed on top. An external battery connector was installed and then the radials were added directly to the board made from CAT5 cable.
The single AA was mounted centrally, a small piece of thin foam insulated this from the PCB which was placed on top. An external battery connector was installed and then the radials were added directly to the board made from CAT5 cable.
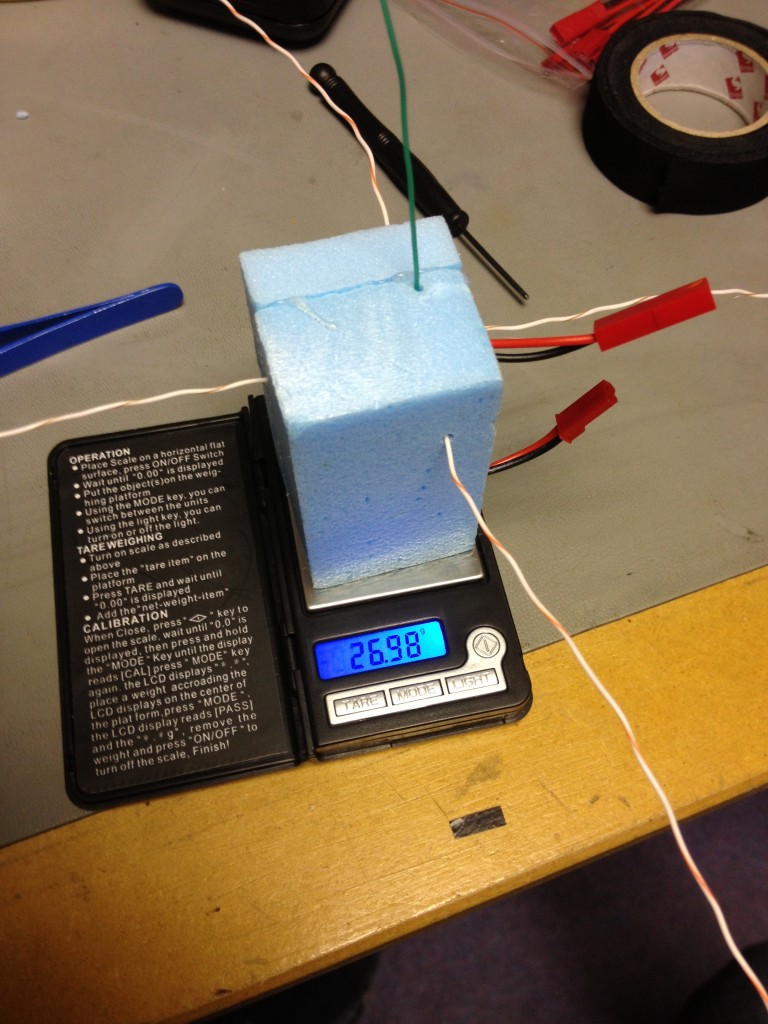
 Finally the top was hot glued in place the result is 27g :
Finally the top was hot glued in place the result is 27g :
 I hope to launch this next weekend but very subject to weather. Telemetry will contain the temperature as reported from the RFM22B’s internal sensor and a bit field for the status (last field) as follows :
I hope to launch this next weekend but very subject to weather. Telemetry will contain the temperature as reported from the RFM22B’s internal sensor and a bit field for the status (last field) as follows :
Bit 0 = GPS Error Condition Noted Switch to Max Performance Mode Bit 1 = GPS Error Condition Noted Cold Boot GPS Bit 2 = RFM22B Error Condition Noted, RFM22B Power Cycled Bit 3 = Current Dynamic Model 0 = Flight 1 = Pedestrian Bit 4 = PSM Status 0 = PSM On 1 = PSM Off Bit 5 = Lock 0 = GPS Locked 1= Not Locked
I.e status code 8 = Pedestrian mode.
Goodday,
excited with picoloads, can you share some more info how to build this tracker? is this APRS? believe you use custom made PCB for such? pls share some info if possible.
Or maybe you have some stock then I would buy it-less hassle for me with soldering (i’m not very good @ it:) thnks for answer.
Serge