
A floater is a balloon that reaches a certain height then doesn’t burst and continues to float at a given altitude. In practice the only balloon that can do this reliably is the Hwoyee 1600g with a slow ascent rate and the smaller foil balloons.
This was demonstrated to great effect (and accidentally!) by Apex Alpha‘s epic flight to Europe. Unfortunately Apex Alpha left the range of the tracking network and was never seen again. Our tracking network has expanded dramatically since then and thanks to SP9UOB’s efforts the number of stations in Poland (where Apex Alpha was lost) means we should have great coverage out there.
However the tracking network is an active thing, people need to be actively listening out for the payload. There is an alternative which is used alot in the US but not in the UK due to our laws. The APRS (Automated Packet Reporting System) is “an amateur radio-based system for real time tactical digital communications of information of immediate value in the local area“.
Its a passive network meaning if you transmit on this and there is a station listening in the area your packet will be digirepeated and you will get your location on the map. Unlike the RTTY based system this is all automatic and needs no one to retune or run custom software. Unfortunately although a network of APRS stations exists in the UK the use of Amateur Radio in any “Aircraft or other Airborne Vehicle” is forbidden. However there is away round this…
Inspired by Apex Alphas successful “failure” Project Swift planned to do this with a dual transmitter board, the Swift board although functional was heavy and needs alot of batteries. In conjunction with James Coxon (M6JCX) we planned a version of the PAVA board that allowed the connection of a separate daughter-board with a HX1 transmitter on it.
The board would have the usual stepup regulator on it, the HX1 requiring 5V would have a separate stepup on it which to save power could be powered on and off as needed. So the ATLAS/PAVA board was born :
 On the left is the microcontroller board running at 1.8V (GPS and RFM22B transmitter on the bottom) and on the right is the HX1 Daughterboard for APRS. The HX1 TXD was fed by a NPN transistor to take the 0-1.8v up to 0-3v. Additionally the GPS was fitted with a PFET to allow the GPS to be turned off and on if needed.
On the left is the microcontroller board running at 1.8V (GPS and RFM22B transmitter on the bottom) and on the right is the HX1 Daughterboard for APRS. The HX1 TXD was fed by a NPN transistor to take the 0-1.8v up to 0-3v. Additionally the GPS was fitted with a PFET to allow the GPS to be turned off and on if needed.
The microcontroller board could be run on its own or with the HX1 transmitter clipped to the top. To ensure compliance with the law code would be written to “Geofence” europe into countries, this was done in Google Earth. Code was then borrowed from Project Swift to ascertain if the payload was currently within a certain area :
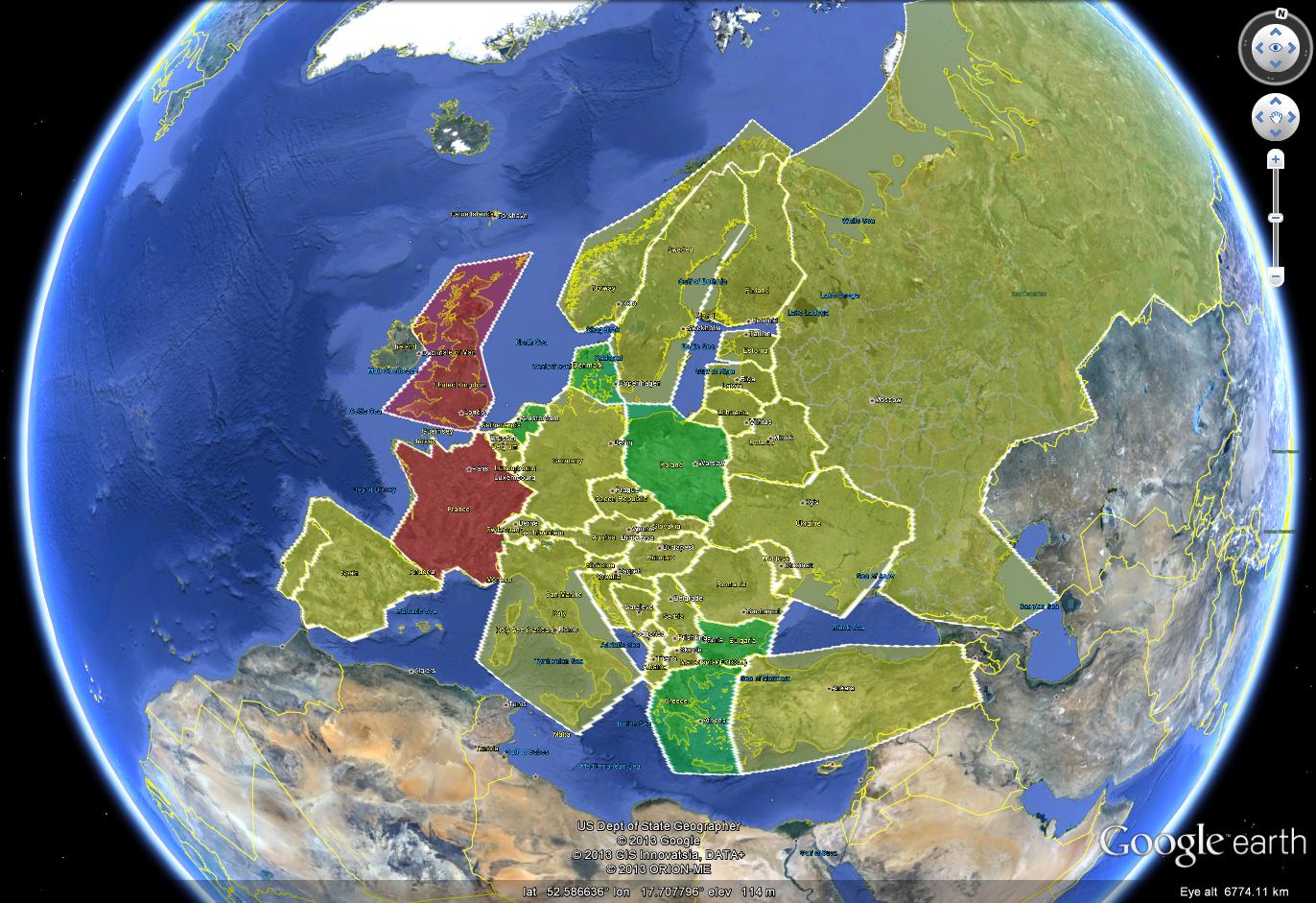
From here we can take action such as turning the APRS off entirely to comply with local legislation or amending the ITU prefix to comply with the CEPT regulations. I.e when in France the call sign of the balloon should be F/M0UPU.
This map above is availble as a KML here : https://github.com/Upuaut/APRS_Projects/blob/master/Data/Europe.kml
Once I worked out a number of faults with the original board one was shipped off to James for testing, I hope to launch one soon as well.
2 Comments.