
Dave Akerman kindly invited me along to launch on Wednesday the 27th of Feb. Dave was launching a Raspberry Pi powered Tardis and has a great write up >here<. Due to the lack of time to ascertain the legality of transmitting APRS in the air I took the decisions not to fly the ATLAS/PAVA board. Instead I ran the same code on my standard PAVA board. It wouldn’t transmit APRS (wasn’t a transmitter fitted) but it would transmit the current ITU country code via RTTY and should be a good test of the code if nothing else.
Dave kindly fabricated a polystyrene ball container and antenna whilst I was driving down and still managed to find time to paint it fluorescent pink (Thanks Dave! Here on the left shown next to PAVA the backup tracker for the Pi launch on the right) :

We decided to get the floater up first. To get the latex balloons to float you need to fill the balloon such that you get an extremely slow ascent rate, normally its suggested you aim for about 5.5m/s however to float we aim for less than 4.5m/s. In the end we decided to aim for 2m/s, which is a compromise between time taken to ascend and chance of floating.
With the Hwoyee 1600g balloon with H2 and the 65g payload this equated to about 320g of neck lift. This was a problem as the filler and hose weighed 550g. In the end we removed the filler and hung some gaffer tape rolls on the balloon, so the neck lift was about right. Attaching the pink ball the launch was quite calm and the balloon floated off upwards bang on target ascent rate :
 At this point Dave and I concentrated on the Pi launch which I won’t cover too much here as Dave covers it in his blog. We occasionally glanced at Spacenear.us and the ascent rate was on track and AVA was heading out over the Bristol Channel as expected.
At this point Dave and I concentrated on the Pi launch which I won’t cover too much here as Dave covers it in his blog. We occasionally glanced at Spacenear.us and the ascent rate was on track and AVA was heading out over the Bristol Channel as expected.
Our concentration taken by the Pi launch we didn’t noticed AVA creeping upwards slowly, it spend alot of time out over the Bristol Channel as it slowly turned direction. Sucessfully recovering the Pi from a field we directed our attention to AVA which was now tracking east towards London and the quite incredible speed of 110mph.
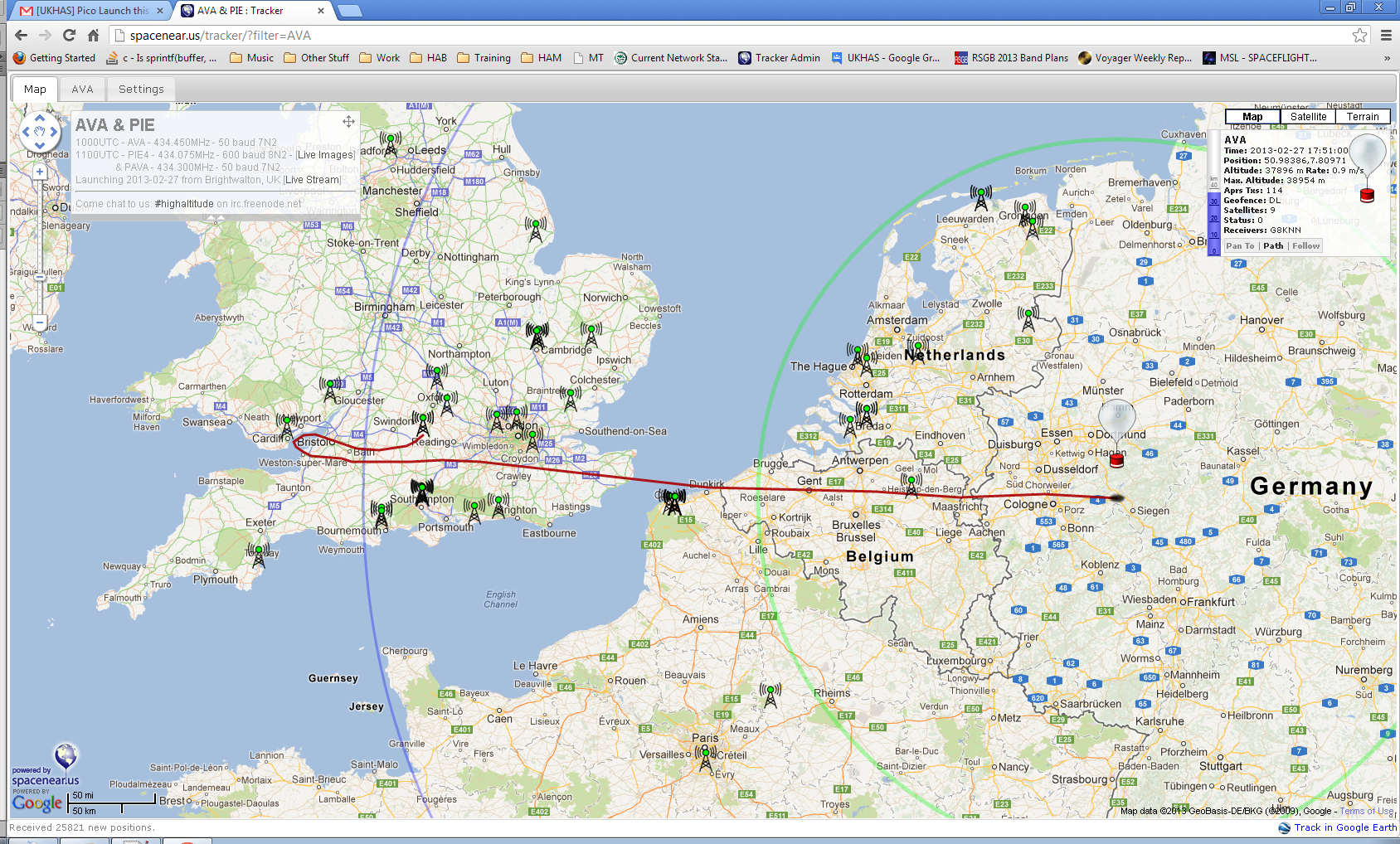
In the hour it took us to get back from the Pi landing site to Daves AVA had left mainland UK and was heading out over the channel at an altitude of 38.5km (126,000 feet) maintaining its extremely fast pace at times touching 120mph. A small (but critical) error in the code exhibited itself at this point, it seems the Geofence for the UK isn’t correct and had the payload had an APRS transmitter it would have started to transmit just east of London which would have been bad!
Hoping the rest of the Geofences would work I headed back to Yorkshire, Dave soon called me to advise as AVA had skimmed French airspace the ITU prefix switch to F, followed shortly by ON as it entered Belgium. Success! As it crossed the Netherlands this switched to PA and then to DL as it entered German airspace at 17:13.
As the sun set AVA was careering across Germany maintaining a corking speed, sadly at 17:51 the radio transmitted its last full sentence, shortly afterwards the radio stopped. This is a known issue with the RFM22B’s and is usually related to them getting cold. I have modified the code to power cycle the radio every 50 lines.
From the point where it turned over Weston Super Mare to the last received packet it managed to go 753km at an average speed of 167kmph, just over 100mph :
Many thanks to Dave Akerman for helping with the launch and providing the gas and to all the receivers who take the time to listen out for these payloads.
Images from the day here : https://plus.google.com/photos/118244444241111963790/albums/5851143941313777297?banner=pwa
Daves blog about the day : www.daveakerman.com/?p=873
0 Comments.