Day 1
What a weekend! I’m happy to report an extremely successful pair of flights for both PIE & AVA. For a write up on PIE please visit Dave’s blog at http://www.daveakerman.com.
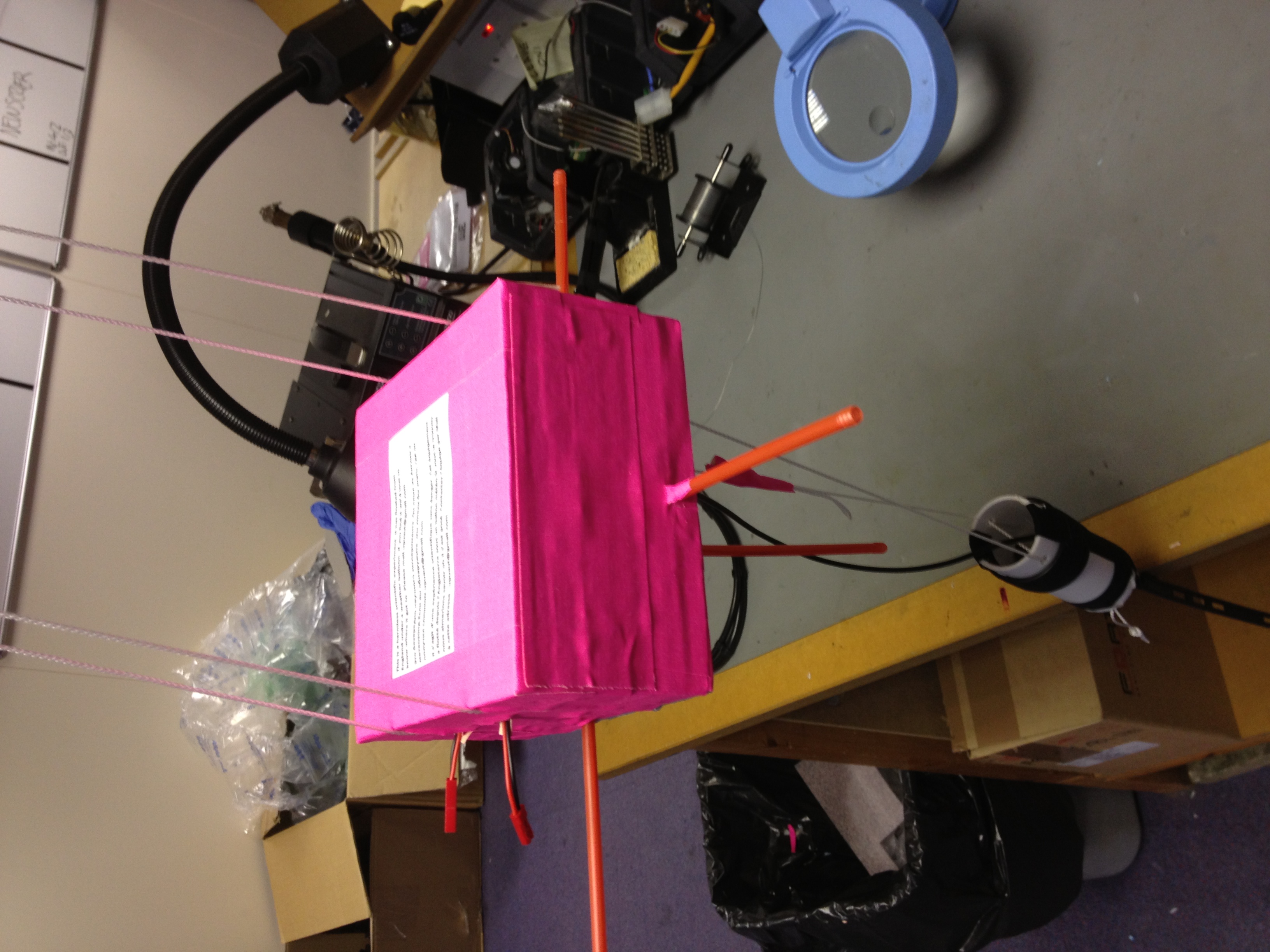
The morning started in a muddy field in Cambridgeshire, we’d agreed to meet nice and early about 9am, it was a pleasant if windy day :

Eben & Liz from www.raspberrypi.org had come along to assist with Dave launching the Pi Camera, in tow was a reporter doing an interview and Graham G3VZV had come along as well.
The plan for the day was to launch two 1600g Hwoyee balloons with very slow ascent rates (we were aiming for 1.5m/s). The slow ascent rate would increase the chances of the balloons entering a float (i.e not bursting) at altitude and extending the flights. The trouble with low ascent rates is measuring the neck lift of the balloon is very tricky, near impossible in any sort of wind whatsoever. Here Eben holds one balloon whilst Dave filled the second one :

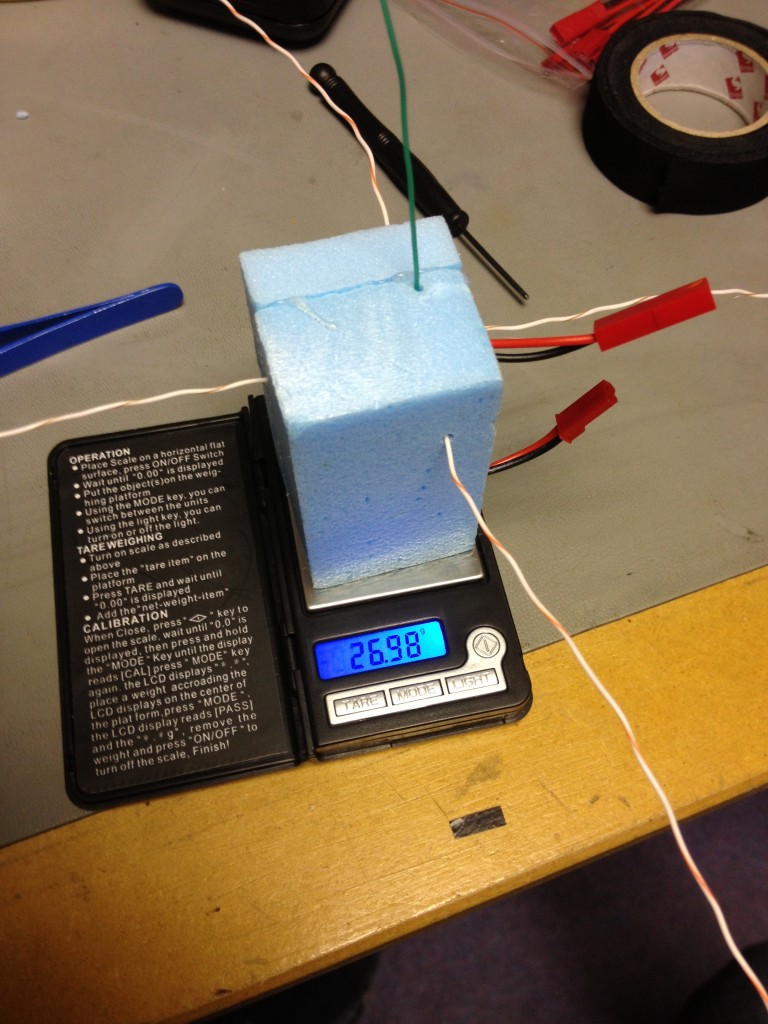
The neck lift on the balloons was about 300g with my payload coming in at 180g and Daves a little more. The balloons with so little gas in also act like large sails pushing the balloon down into the ground. Here Eben and Liz hold the balloons :

At about 11:44 UK time with the balloons filled we decided to launch, the wind was dragging the balloons horizontal as you can see from this picture from my perspective :

With a break in the wind we took a run and released both balloons (Thanks to Alex from Raspi.tv for capturing the stream)
Daves rose slowly upwards and mine err didn’t. AVA got to about 160 meters and then stopped ascending. We watched as the payload just cleared the trees about 0.5km away, telemetry indicated the payload started to descend so we quickly threw everything in the car (sorry BATC.tv stream users that’s why the stream died).
Thankfully just as we were about to go chase it AVA decided to start ascending properly.This continued until just after 1pm at about 6200 meters in altitude where abruptly the 70cms radio packed up. We were unsure if it was just the cold affecting the transmitter, we wouldn’t know until it made landfall near the Netherlands where the second, APRS, transmitter would hopefully fire up.
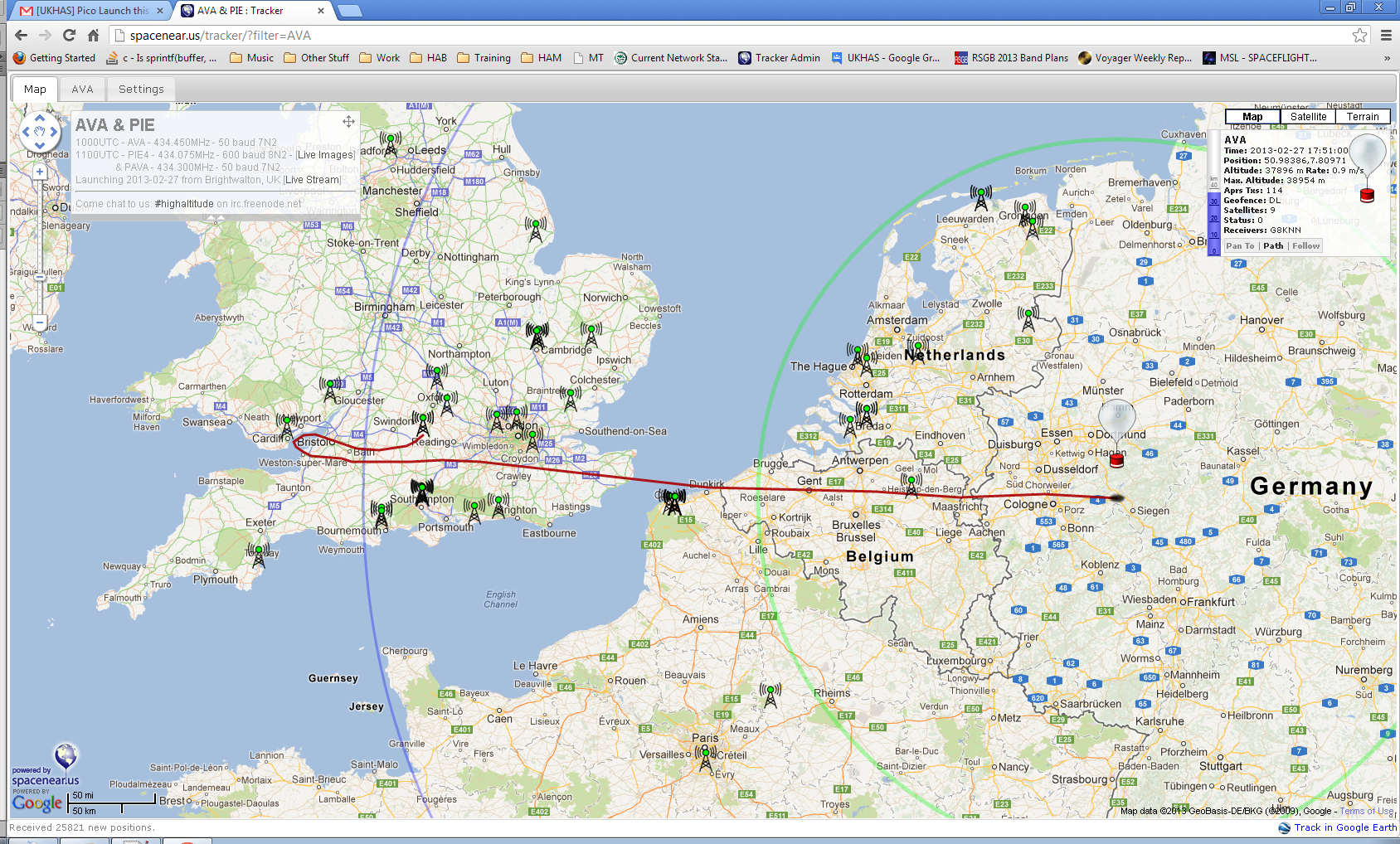
At 15:30 as the payload entered the Netherlands airspace the APRS transmitter fired up and was igated up to http://aprs.fi. The HABhub team quickly transposed this on to spacenear.us. As the payload left the Netherlands and entered Germany the APRS continued to transmit.
Suddenly at 20:45 a Polish HAM SP3MCY started uploading telemetry from the 70cms transmitter, it had come back to life! At about the same time the APRS decided to stop working entirely (it wasn’t to come back for the rest of the flight). It was obvious something wasn’t happy as the 70cms kept stopping and then coming back. My code does regularly reboot the RFM22B so this is possibly what kept it working.
At about 22:00 stopped transmitting again. AVA had gone silent and dropped to about 22km in altitude as the gas had cooled down over night. With no APRS and no 70cms telemetry I decided to hit the sack happy the mission had been a success.
Day 2
I woke up at 7am and optimistically glanced at spacenear.us through blurry eyes. To my amazement, AVA was awake, over the Czech Republic and climbing slowly in the early morning sun. DL7AD had received the 70cms transmissions at 0615 UK time, for the rest of the flight the transmitter worked with no failures.
An hour later and AVA had receivers from Poland, Slovakia and Austria tracking it. Over the next few hours AVA climbed to a maximum altitude of 38984 meters, sadly it didn’t get back into a float and around 09:05 UK time AVA burst over Austria and started its decent.
With a rather leisurely decent the payload finally came to rest at the crest of an Austrian mountain 1600m above sea level. We really thought that would be the end of the story. Really I mean who would be able to recover that. We didn’t count on the Slovaks.
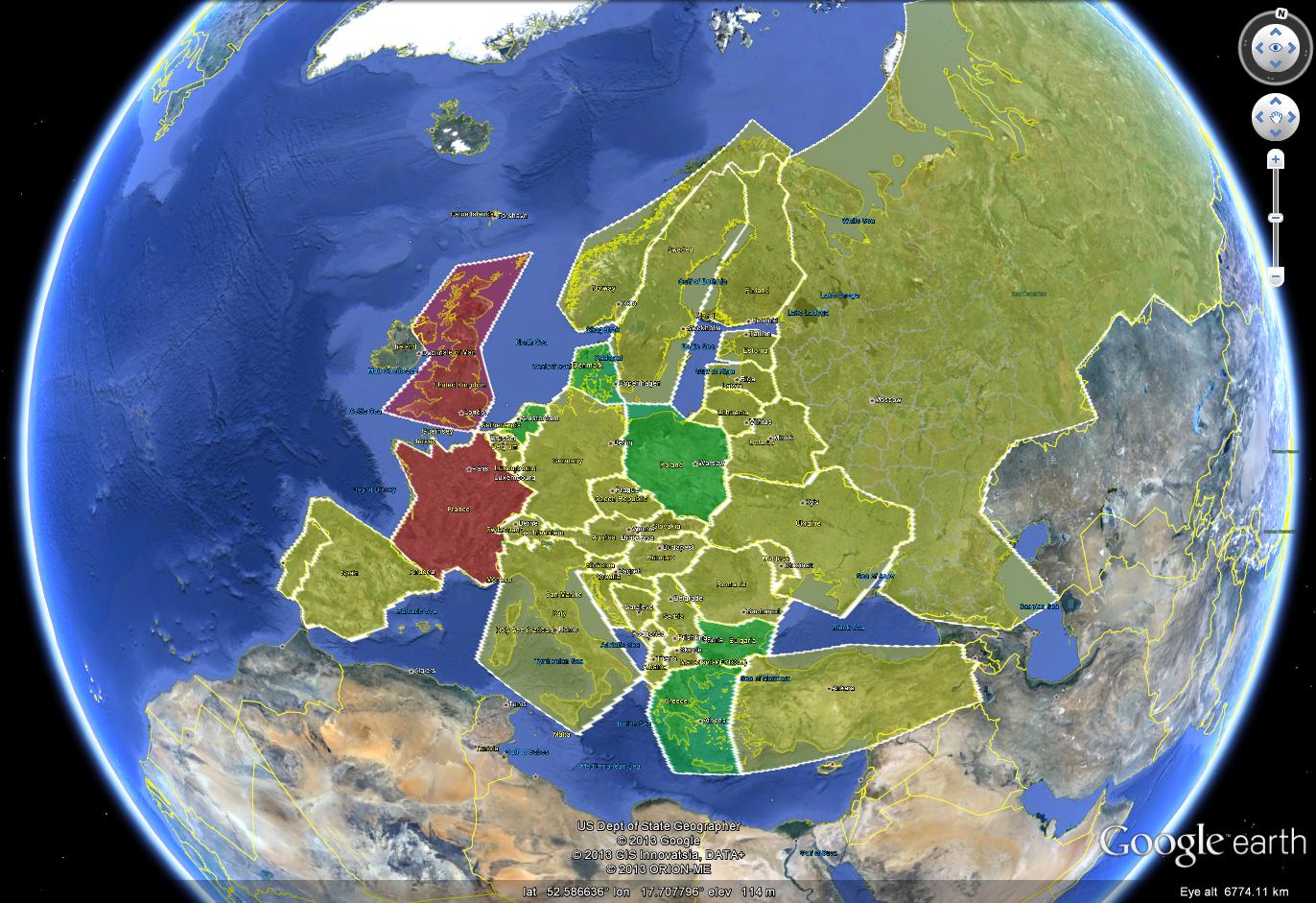
Enter Radim Mutina & friends from stsproject.net. Based out of Slovakia Radim (OM2AMR) and friends decided to go attempt the recovery of AVA from Austria. The terrain map showed the scale of the issue :
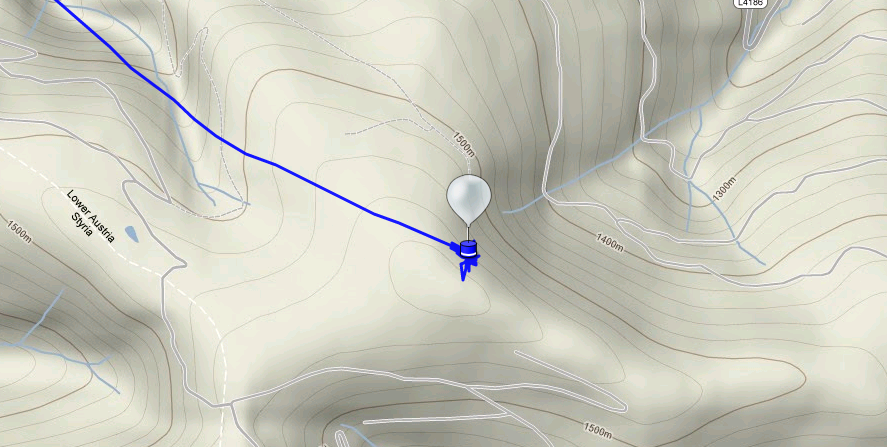
However undeterred the STS Project team headed out. Using APRS to report their position we watched as they took the slow climb up to AVA’s landing location :
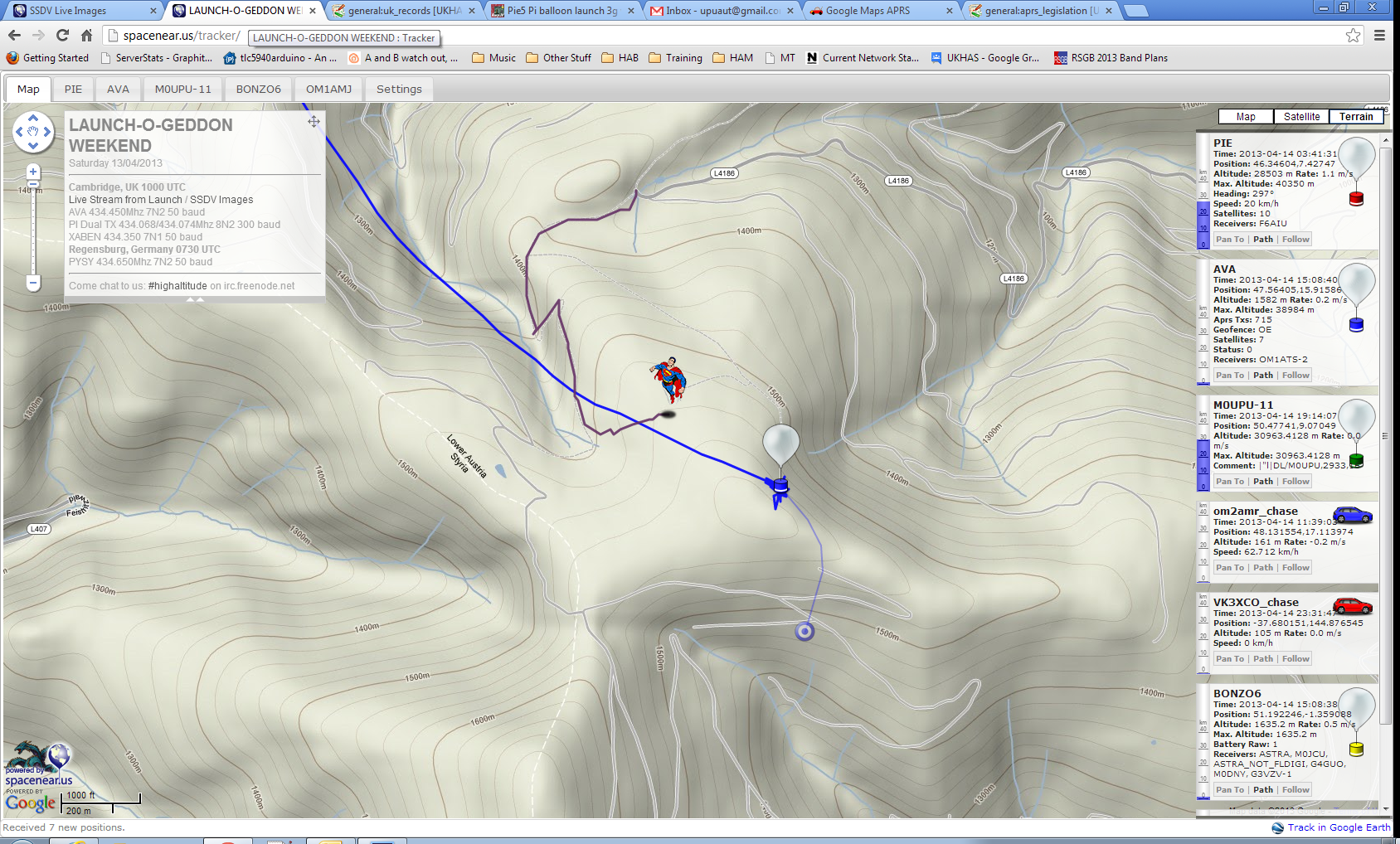 In honour of this we changed their icon to a superman as I thought it was apt! As we subsequently saw from the pictures this was not an easy recovery :
In honour of this we changed their icon to a superman as I thought it was apt! As we subsequently saw from the pictures this was not an easy recovery :

Finally the location of Team STS and AVA were on top of each other, after an initial panic the payload may be in a tree OM1AMJ relayed a message back that AVA had been recovered!

The payload was so high up even on the ground OM1ATS was still receiving it in Slovakia. The final landing position was 47.56405,15.91578.
 From left to right : Peter Vittek, AVA , Radim Mutina (OM2AMR), Juraj Marsalik (OM1AMJ) and behind the camera Brano Janicek.
From left to right : Peter Vittek, AVA , Radim Mutina (OM2AMR), Juraj Marsalik (OM1AMJ) and behind the camera Brano Janicek.

So all in an amazing flight covering a distance of 1256km in 22 hours and 29 minutes. My eternal thanks to everyone who turned out to track the payload, I won’t list everyone here as the post would be twice as long and I may miss someone as so many people have contributed to this project. I consider this launch more of a UKHAS group effort. Thanks to batc.tv for giving us the streaming.
Finally how can you say enough thanks to Peter Vittek, Brano Janicek, Juraj Marsalik, Radim Mutina and Dano Radovic liaising between the team on the ground and IRC. You went way beyond the call of duty spending all day recovering AVA and documenting it so well for everyone to see. Amazing guys, amazing!
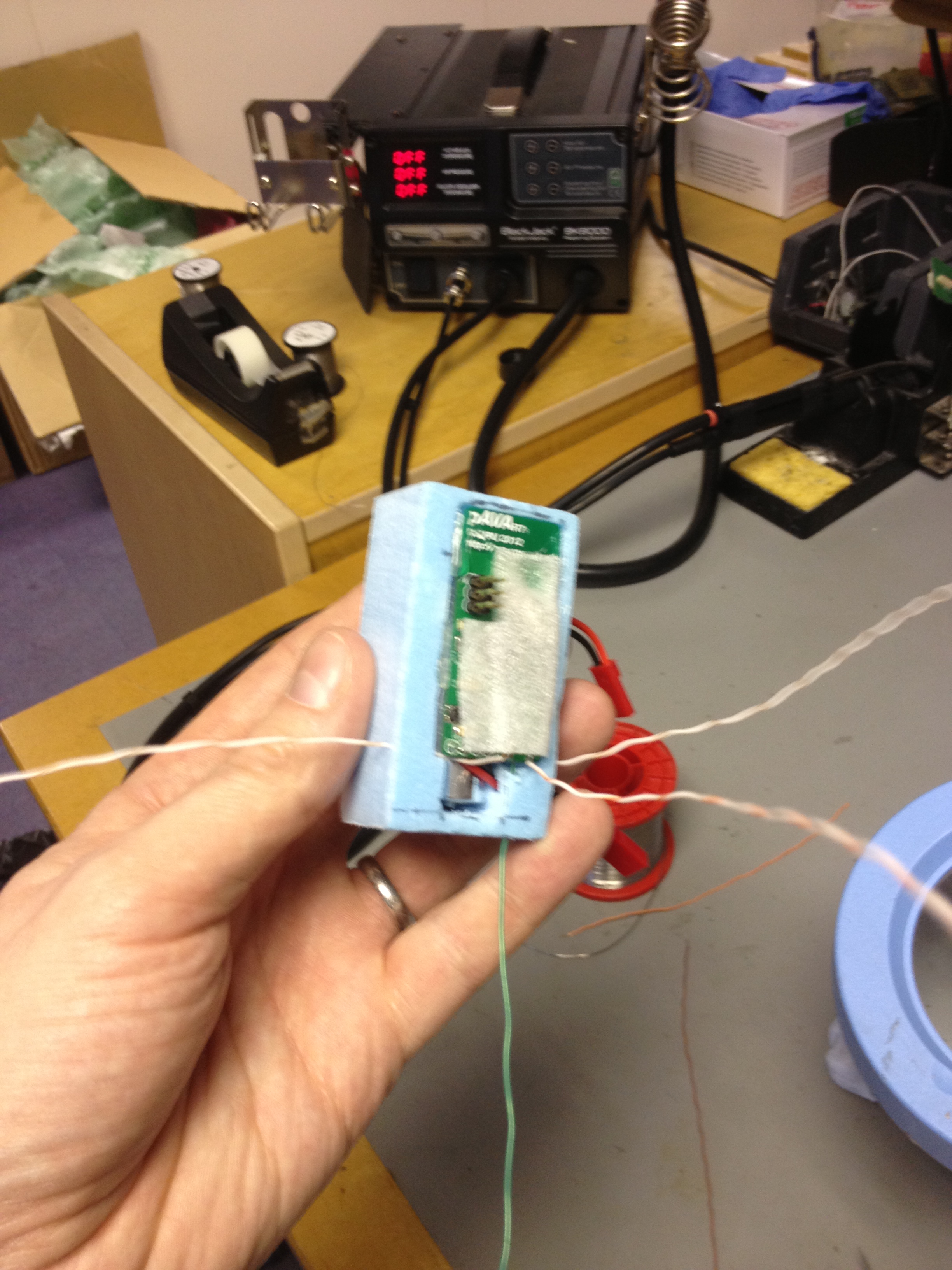
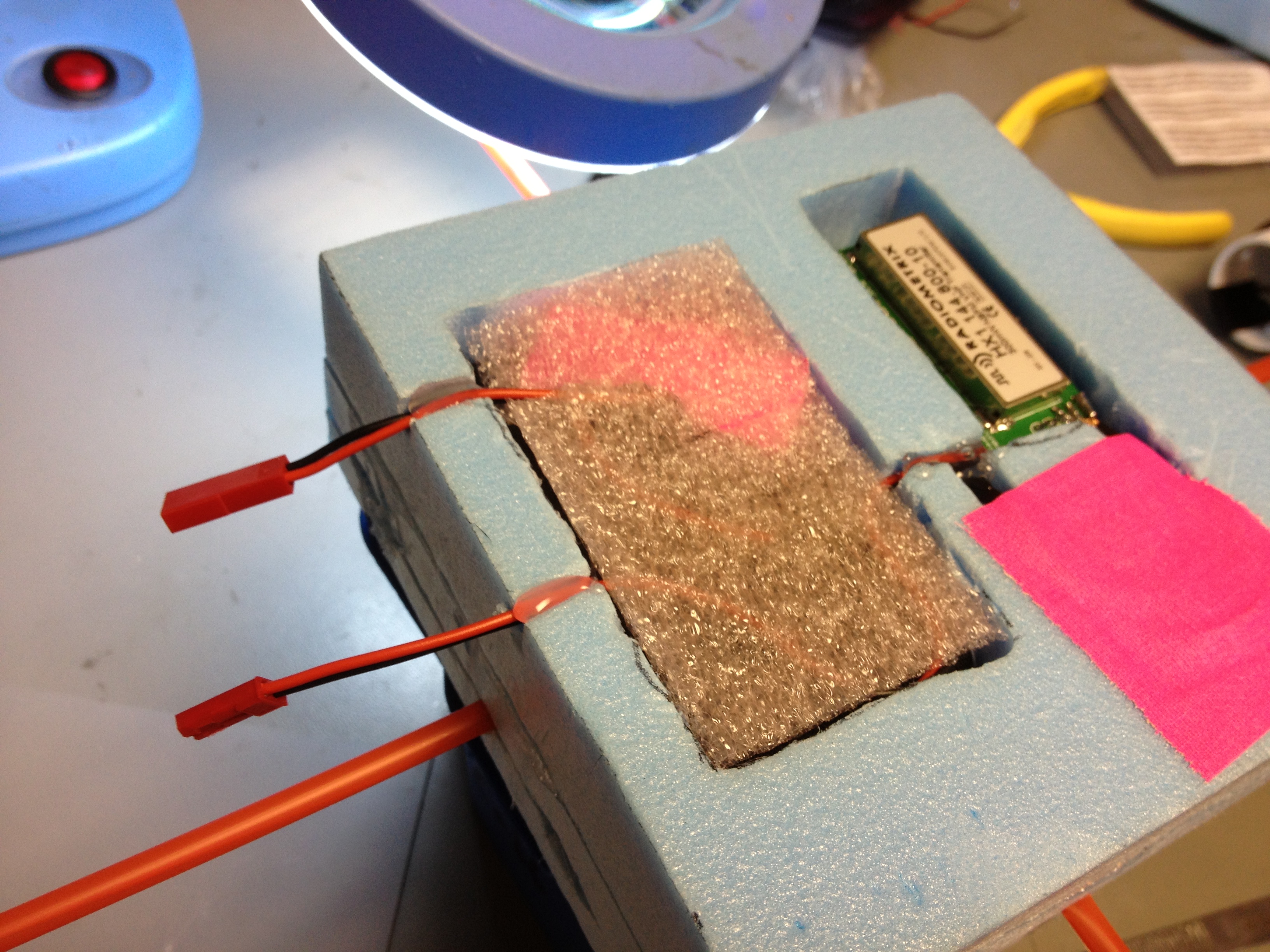
UPDATE : Radio failure appears to have been caused by the insulating foam wedged between the two boards, as the foam had expanded due to pressure it had popped the HX1 board off the controller. Also a nice video from Team STS :
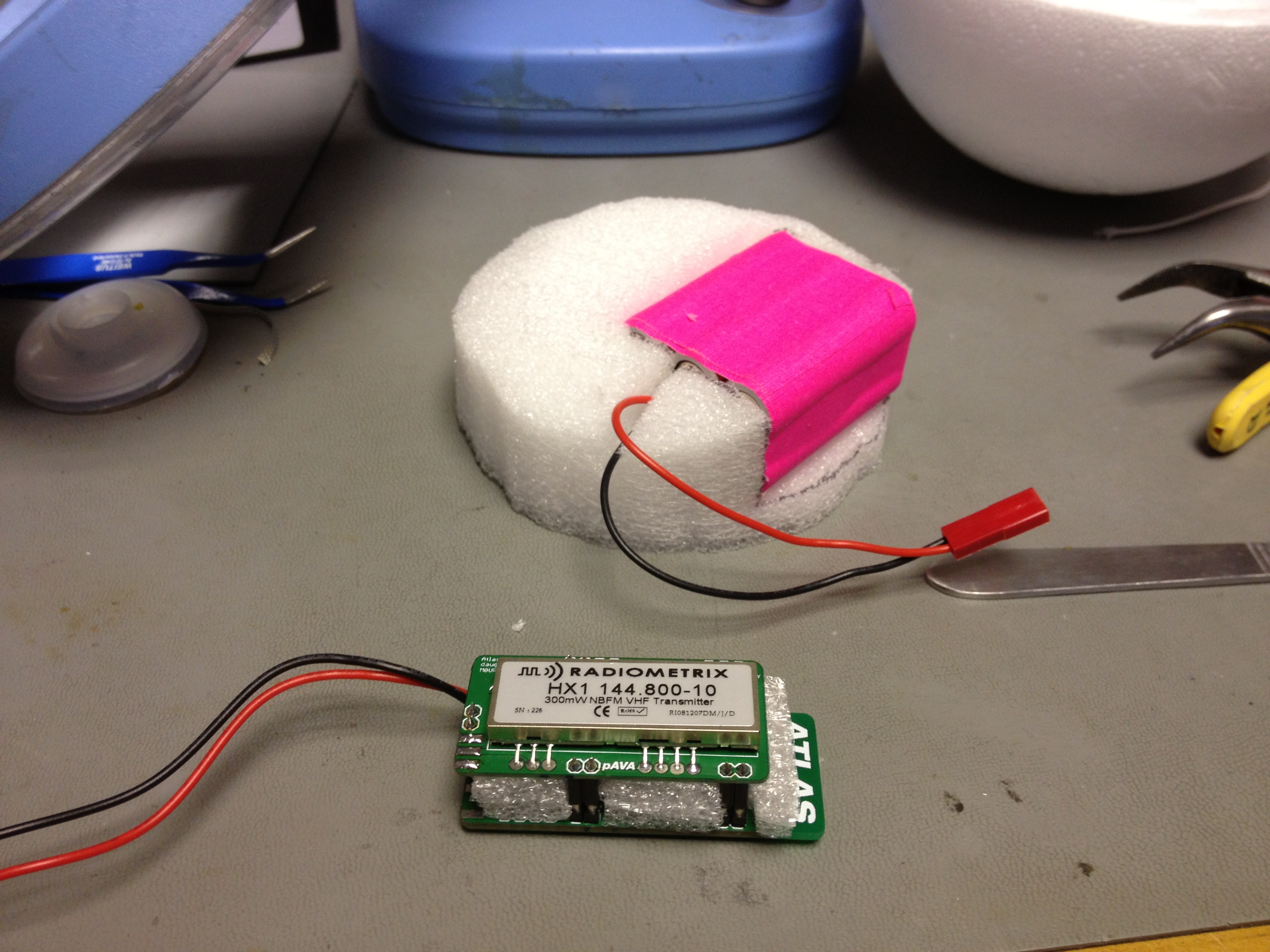
Update 2 : People have been asking for technical details on the transmitter being used. It was a custom design described here : http://ava.upuaut.net/?p=551